
Italian National Agency for New Technologies, Energy and Sustainable Economic Development

Transport: from ENEA sensors in electric vehicles to detect road surface conditions
State-of-the-art sensors onboard electric vehicles -both self-driven and human-driven- for monitoring of road surface conditions, have been developed at the ENEA Robotics and Artificial Intelligence Laboratory for the Smart Road project, as part of the "Electrical System Research" program funded by the Ministry of the Environment and Energy Security.
“The idea behind is that of self-driving vehicles acting as sensors to enable comprehensive monitoring of urban conditions and to improve safety, traffic flows and driving comfort, with benefits also in terms of energy saving and sustainability”, explained Sergio Taraglio, at the ENEA Robotics and Artificial Intelligence Laboratory of the Energy Technologies and Renewable Sources Department, responsible for this line of activity.
Two different sensors have been developed to analyse the state of the road surface,: the first uses a laser-based LIDAR (Light Detection and Ranging) to measure geometric distances with great accuracy, while the second consists of a camera placed frontally which analyses the video stream with the help of Artificial Intelligence.
“The data collected is used to evaluate the conditions of the road surface. LIDAR provides road geometry parameters, detecting road surface anomalies, like potholes or bumps, marked in red on a display, with green indicating a smooth surface, capable of operating as an ADAS (Advanced Driver Assistance Systems)”, continued Taraglio.
The second sensor uses a deep neural network trained to detect defects in the video stream. It allows you to see objects that cannot be measured by LIDAR, like network cracks or those defects due to "painted" markings on the asphalt (pedestrian crossings or faded lane lines).
Both sensors work in real time and can be used for urban monitoring: the information on the road defect, georeferenced, is sent to the smart city manager to map road conditions and plan repairs.
Furthermore, the self-driving electric vehicle used for testing is equipped with an air quality sensor that records particulate concentrations and sends data to process high-resolution pollutant maps in real time.
Systems to collect and analyse sound information are currently being developed with a double purpose: to measure noise pollution and to allow the self-driving vehicle to be able to use the sound information to manage potentially hazardous situations: for instance, in case of an emergency vehicle approaching, it recognizes the situation and clears the road as much as possible”, said Taraglio.
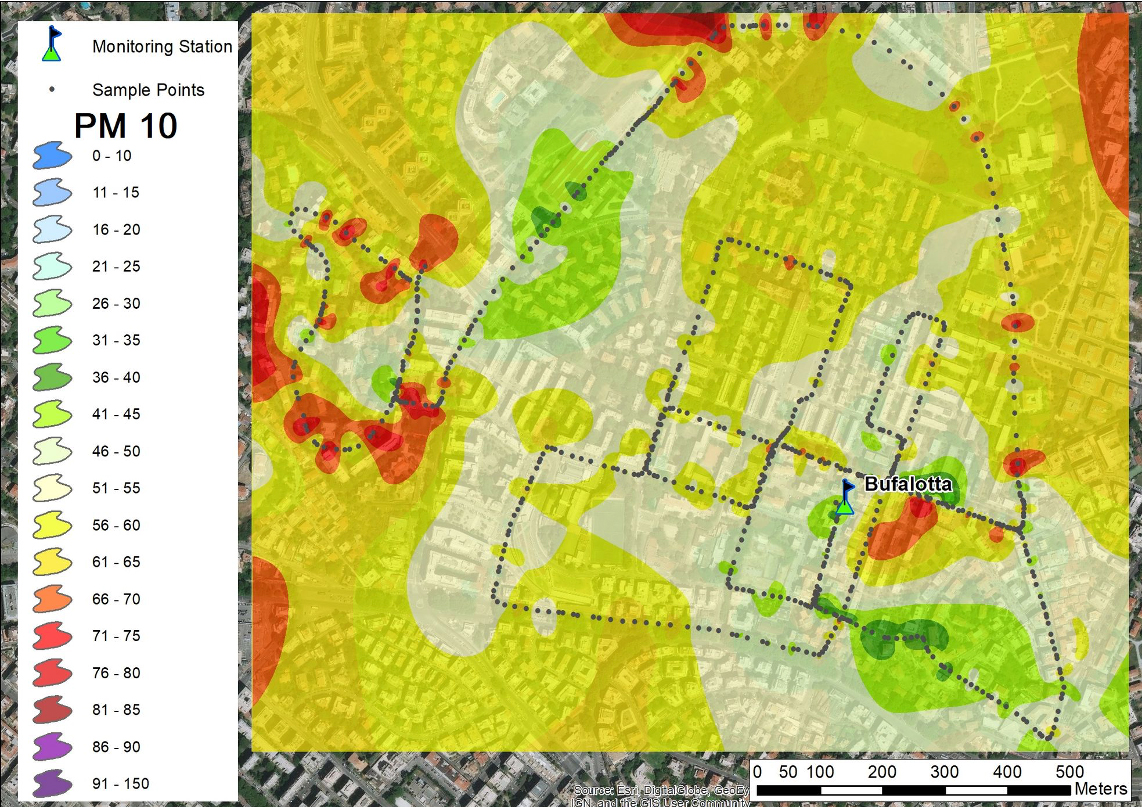
Example of a map of particulate concentration drawn up by Smart City based on data from a vehicle equipped with an air quality sensor (grey dots)
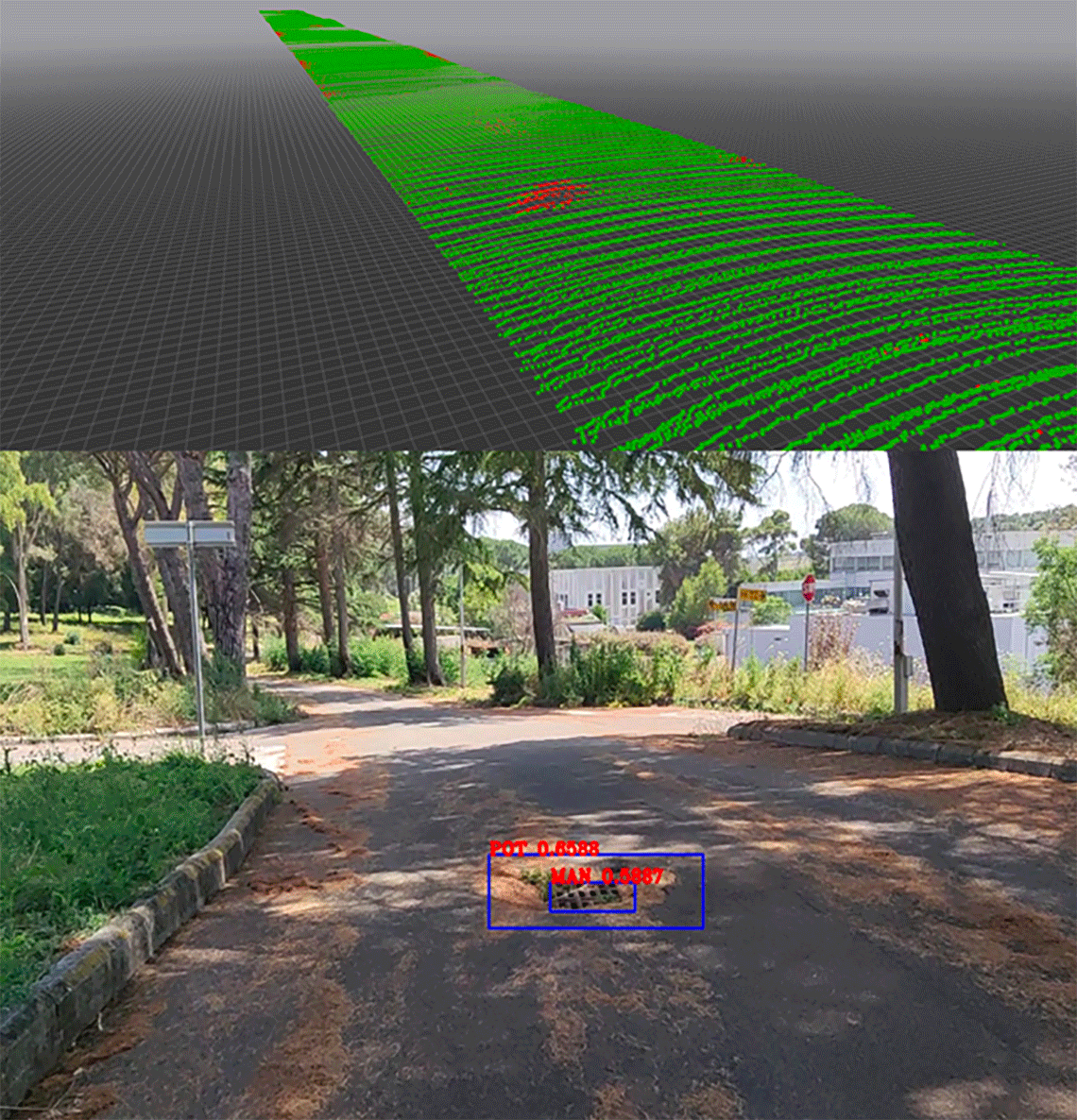
Assessing road surface quality with the two synergistic approaches. Above: laser distance measurement marking in red potholes or bumps; below: image of the road with the results of the AI analysis which detects a pothole and a manhole; the image is related to the same portion of road analysed with the laser, showing the same defect with different techniques.
Photogallery





